In the past, i was using a « multimedia controller knob USB » (on Windows OS with AUTOHOTKEY script to map SYSCALL of sound to special key),
This system can control my RADIO TRANSCEIVER (FT897).
For exemple i can use one RASPBERRYPI for TRX/TCP-IP control with CRX-COM and another RASPBERRYPI from my remote for USB BUTTON control,
here i’m using the same RASPBERRY device for TRX CAT, CRX-COM and USB Control.
I’ve found a new system based on LINUX now to do that, AHK equivalent system is call « TRIGGERHAPPY » on LINUX.
I’m using a RASPBERRY PI4 + an USB « Cooidea USB Multimedia Control« .
In my case on RPI4, TRIGGERHAPPY is already install / natif.
The advantage of this solution is :
– i did’t have to use my PC/tablet here, only RASPBERRYPI4 + USB CAT SYSTEM + USB MEDIA CONTROLLER.
– Can work via INTERNET/NETWORK.
For HAM radio, use « TRIGGERHAPPY » is very usefull, you can map key/button to call a specific command,
exemples : control relay by press a key/device button, change frequency, turn antenna (key press/relay map).
Here is a photo of the test system RASPBERRYPI4+USB MULTIMEDIA Button, on the bottom right :

1. First step identify KEY mapping with USB device :
Simply connect a device (keyboard/media controller) to your raspberry.
For exemple here i connect the USB device, i launch a « dmesg » command to have information :
Now let make a small test, we have a command to debug the « TRIGGERHAPPY » process it’s the THD command,
So after plug the USB device, i simply turn up/down the volume button and press on it to call « mute » option :
2. Create the TRIGGERHAPPY configuration :
I can create the button configuration for EVENTS mapping :
I’ve create a PHP script to map KEYPAM to WEBSOCKET command here is the script :
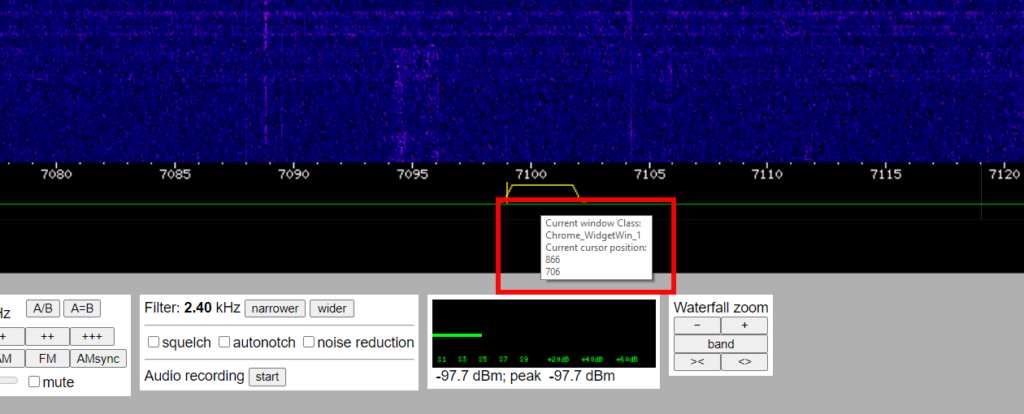
I can call it with 3 commands for the moment, UP/DOWN and BAND UP (in future i will probably move to an USB system with more buttons, like STEP/MODE changing).
To create the script, i’ve first made this test (send a WEBSOCKET cmd via CLI with WEBSOCAT),
here CRX-COM program talk with JSON :
After succefully send QRG / change BAND,
i’ve create this script : /opt/crx/crx-com/qrg_whell.php
Frequency configuration is a simple script : /opt/crx/crx-com/qrg_whell.qrg.php
The setup of WEBSOCAT here is very simple here :
73 to all,
See :
CRX-COM/QRG-WHELL : https://git.crx.cloud/f4eyq/crx-com/-/tree/master/QRG-WHELL
TRIGGERHAPPY : https://github.com/wertarbyte/triggerhappy/
WEBSOCAT : https://github.com/vi/websocat
CRX-COM :
https://project.crx.cloud/Remote_ham_radio_station_setup_guide
https://project.crx.cloud/crx-com
VFO-USB :
https://bastien.barbe.pw/ham-un-bouton-vfo-usb-pour-son-catsystem/
USB DEVICE can be use, type « multimedia controller knob USB »
on ALIEXPRESS / AMAZON :

See also :
=> Test Windows10 +MCHF WINDOWS10PC +TRX-MCHF (FT817 protocol) : https://bastien.barbe.pw/webcontrol-radio-transceiver/
=> Test Mobile Phone / Mumble / m.crx.cloud / CRX-COM (01/10/2021) : https://bastien.barbe.pw/ham-remote-station-on-mobile-phone/
=> Test WIFI/RASPBERRY/FT817 (04/04/2020) : https://bastien.barbe.pw/cat-system-en-wifi/
=> Test FT817+CRX-COM (15/06/2019) : https://project.crx.cloud/crx-com-rasb-ft817