
Date : 16/11/2020
Update : 18/11/2020
Hello everybody,
For people who need accuracy inside their digital radio modes, here is a configuration set for Windows / Linux :
Install NTP program, for Windows user you can use this binary :
https://www.meinbergglobal.com/english/sw/ntp.htm#ntp_stable
For LINUX simply do an « apt-cache search ntp » and install server dameon.
On Windows, configuration is the same ( via ntp.conf, edit in administrator mode your configuration ) :


If you want CRX Purpose an NTP service :
You can add these servers :
On Windows you have two shortcuts :
For Windows10, these shortcuts are in :
For LINUX simply do :
Depending your country, you can modulate your NTP servers.
Here CRX is for Europe user’s.
That all, you can use your FT8 mode, now with best accuracy possible !
73 ,
Sources :
https://km4sqs.blogspot.com
https://www.dxzone.com/
https://en.wikipedia.org/wiki/WSJT_(amateur_radio_software)#FT8
https://en.wikipedia.org/wiki/Network_Time_Protocol



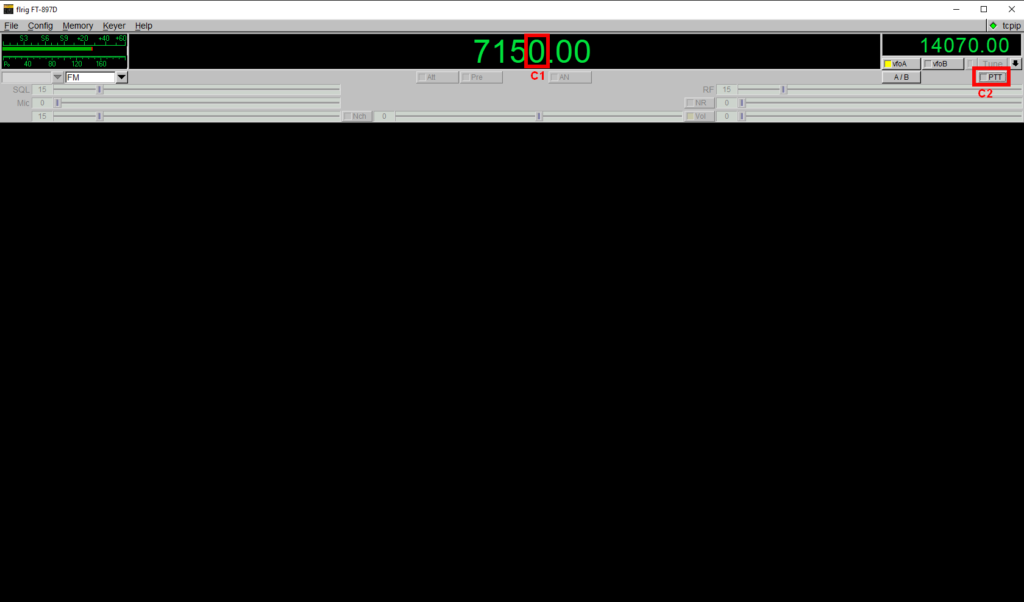
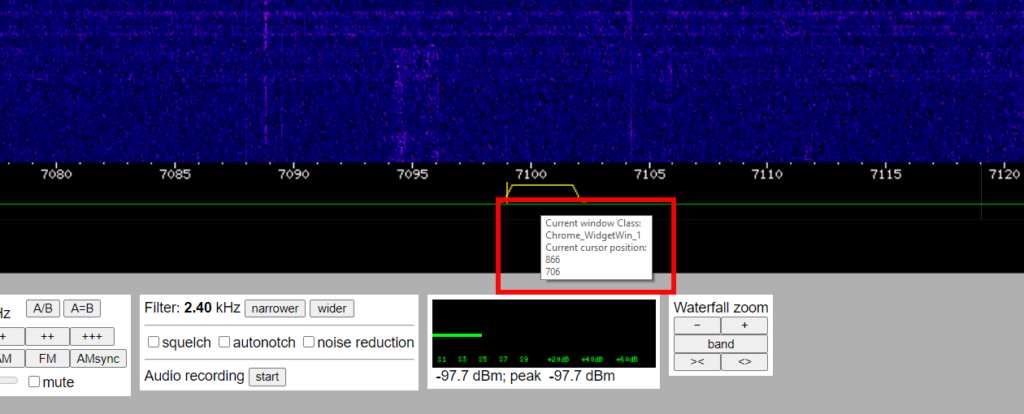

























 About 5 years ago, i’ve create a small php script to control my YAESU FT817 via APACHE server and a LINUX box,
About 5 years ago, i’ve create a small php script to control my YAESU FT817 via APACHE server and a LINUX box,